【初公開】立命館大学発スタートアップ 人機一体、「ハイブリッド力制御方式」による人型ロボット成果発表会を実施
人機一体
~人が操作するロボット「人機」のデモンストレーション、実用化に向けての技術展望~

株式会社人機一体(本社:滋賀県草津市、代表取締役 社長:金岡博士、以下「人機一体」)は、立命館大学(滋賀県草津市、学長:仲谷善雄)との共催により、「ハイブリッド力制御方式」による人型ロボットの成果発表会、およびデモンストレーションを実施することをお知らせいたします。御来場のうえ、取材いただきたくよろしくお願いいたします。
人機一体は、立命館大学発のスタートアップ企業です。本成果発表会は共催の立命館大学に加えて、後援の滋賀県、草津市(自治体)、滋賀銀行、京都中央信用金庫、京都信用金庫(地元金融機関)との産学官金連携を通したスタートアップ推進としての成果発表の場となります。
人機一体は、「あまねく世界からフィジカルな苦役を無用とする」を理念に掲げており、現在は川崎重工業株式会社(以下、川崎重工業)のヒューマノイドロボット「Kaleido」を用いて、「ハイブリッド力制御方式」による人型ロボットの研究開発を実施しております。本成果発表会では「ハイブリッド力制御方式」による人型ロボットを用いて、臨機応変に様々な作業を行なえる様子をデモンストレーションで披露いたします。
開催概要
タイトル : 株式会社人機一体 成果発表会 2024
~ 「ハイブリッド力制御方式」による人型ロボット発表、技術解説、
デモンストレーション、実用化に向けての展望 ~
主 催 : 株式会社人機一体 (共催:立命館大学)
開催日時 : 202 4年 8 月 1 日(木)11:00 開始(10:00 開場)
詳細は下記のタイムスケジュールを御覧ください。
開催会場 : 草津市立草津クレアホール(JR 東海道本線 南草津駅から徒歩 13 分)
配 信 : オンライン配信の実施はありません。
申込方法 : 下記 URL イベントページより御申込ください。
https://www.jinki.jp/event/20240801
後 援 : 滋賀県 / 草津市 / 滋賀銀行 / 京都中央信用金庫 / 京都信用金庫
発表するロボット
零一式カレイド ver.1.1
「ハイブリッド力制御方式」による人型ロボットの研究成果として、川崎重工業のヒューマノイドロボット「Kaleido」(※1)に、独自制御技術「ハイブリッドオートバランス制御(HABC)」を実装した「零一式カレイド ver.1.1」を用いてデモンストレーションを実施いたします。遠隔操作による、他ロボットとの協調作業、人との協調作業デモンストレーションなどを実施し、現場での実用イメージを示す予定です。
また本件は、広島大学 機械力学研究室 菊植 亮 教授 との共同研究の成果です。

▲ 左:零一式カレイド ver.1.0(上半身のみへの制御実装モデル) 右:人機操作機 ver.3.2(遠隔操作に用いる操作機)
(※1)Kaleido とは
川崎重工業が研究開発を行なっているヒューマノイド(人型)ロボットであり、成人と同程度の体格を持ちながら「転んでも壊れない」堅牢な構造を特徴としています。

来場にあたっての注意事項
– 座席数に限りがございますので、下記 URL より事前参加登録をお願いいたします。イベントページ)https://www.jinki.jp/event/20240801
– 午前の部のみ、午後の部のみの参加も可能です。
– 10:40 よりプレスブリーフィングを実施いたします。午前の部へ御参加の方は併せて御参加ください。
– 受付にて、名刺を 2 枚頂戴いたします。1 枚は名札として名札ケースに入れて使用いただきます。
– 幕間時間以外の入退出は御遠慮くださいますようお願いいたします。
– 駐車スペースが限られるため、近隣のパーキングを利用いただく場合がございます。
– 映像用のカメラ設置スペースを用意しております。デモンストレーション含め撮影いただけます。
– 会場の音響設備から音声ライン出力が可能です。事前参加登録時に御入用の旨を回答願います。
– 当日来場いただいたメディア様限定で、プレスキットを配布いたします。
タイムスケジュール
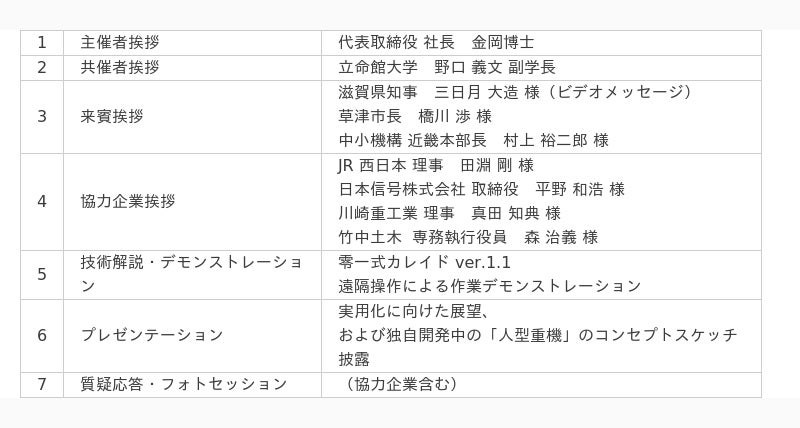
午前の部:記者発表会(11:00−12:30)
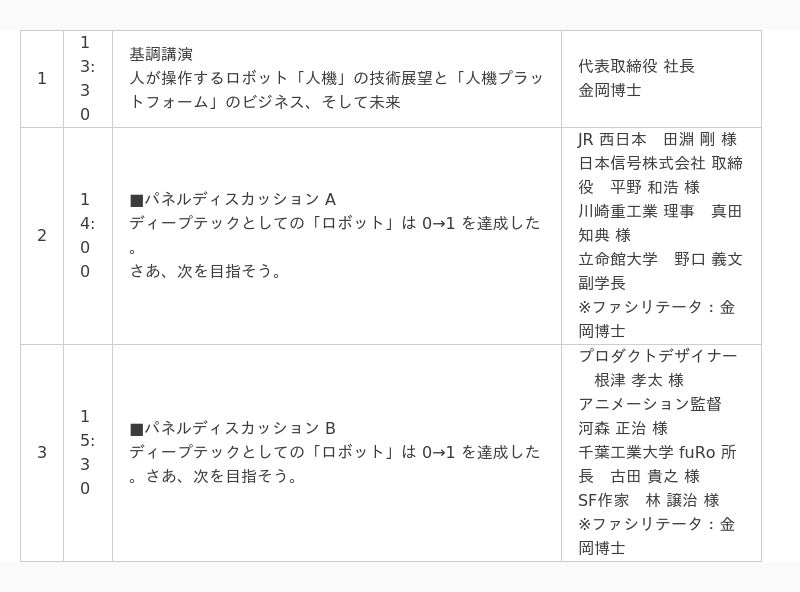
午後の部:講演会(13:30−16:30)
協賛企業
![]()

これまでの取組
(1) 川崎重工業の「Kaleido」を用いた取組
2023 国際ロボット展(iREX2023)にて、川崎重工業の Kaleido に人機社独自の力制御技術「パワー増幅バイラテラル制御技術」を実装、および人機カラーである黒・オレンジへの外装変更を行なった、『零一式カレイド ver.1.0』を初公開しました。上半身の遠隔操作デモンストレーションを披露しており、二足歩行ロボットを用いた全身遠隔操作システムの研究開発を行なっていることを発表いたしました。
また同展示会での川崎重工業ブースでは、災害時の避難所を想定したシチュエーションでの運搬作業など、自動制御による人との協調作業デモンストレーションが実施されました。
本成果発表会では、上記の二足歩行ロボットを用いた全身遠隔操作システムの研究開発成果として、遠隔操作だからこそ実現できる、臨機応変に様々な作業を行なえる様子をデモンストレーションとして披露いたします。

▲ 川崎重工業ブースでの、災害時の避難所における人との協調作業デモンストレーション(提供:川崎重工業)
▲ 人機一体ブースでの上半身遠隔操作デモンストレーション
左:零一式カレイド ver.1.0 右:操縦者
(2) JR西日本 草津訓練線での取組成果
鉄道分野における高所重作業の機械化を目的として、西日本旅客鉄道株式会社(以下、「JR西日本」)と日本信号株式会社(以下、「日本信号」)と『零式人機 ver.2.0』の共同開発を行ない、2022 年 4 月から草津市内の JR 西日本 草津訓練線にて実証試験を実施してまいりました。零式人機 ver.2.0 は人型重機(ロボット)が高所作業車のブーム先端に取り付けられており、安全な場所に設置した操縦席から遠隔操作にて自在に操ることが可能です。草津訓練線での試験を通して、様々な高所重作業に対応できることを実証してきました。本成果発表会においても零式人機 ver.2.0 の展示を予定しており、零一式カレイド ver.1.1 との協調作業デモンストレーションを予定しております。

▲ 鉄道設備メンテンナンス作業の様子(提供:JR 西日本)
▲ 零式人機 ver.2.0 ロボットシステム全体(提供:JR 西日本)
▲ 零式人機 ver.2.0 伐採デモ(提供:JR 西日本)
直近では、草津訓練線での実証試験などを成果として零式人機 ver.2.0 をベースとした「多機能鉄道重機」が日本信号から製品化され、2024 年 7 月以降順次、JR 西日本の営業線での鉄道設備メンテナンスへ導入されることが発表されております。本製品は人機一体のロボット工学技術を搭載したロボットとして初めて製品化されたものであり、今後は鉄道分野に留まらず多方面への展開が予定されております。

▲ 多機能鉄道重機
人機一体と滋賀県草津市
(1) 立命館大学発スタートアップ

▲ 創立の地 立命館大学 BKC インキュベータ(提供:中小機構)
人機一体は、立命館大学 理工学部 ロボティクス学科の講師を務めていた、ロボット工学者の金岡博士が創立したスタートアップ企業です。2007 年 10 月に立命館大学BKCインキュベータにて創立し、立命館大学生のインターンシップや立命館大学卒の社員の受入なども積極的に行なっております。
本成果発表会においては、創立当時にご支援を賜りました、立命館大学 野口 義文 副学長、および中小機構 近畿本部長 村上 裕二郎 様から立命館大学発スタートアップ企業としての人機一体への期待などをコメントとして頂戴する予定です。
(2) 滋賀県、草津市との連携
現在、人機一体は立命館大学 BKC インキュベータを離れ、滋賀県草津市内に本社「秘密基地人機一体」(以下、「秘密基地」)を構えております。2024 年 5 月には 橋川 渉 草津市長、6 月には 三日月 大造 滋賀県知事に秘密基地を視察いただき、高所重作業対応の人型重機『零式人機 ver.2.0』の操縦体験を通して、弊社のロボット工学技術を体験いただきました。今後は、滋賀県および草津市と連携を深め、滋賀県内での実証試験を実施してまいります。また 2028 年 4 月の開講が予定されている「滋賀県立高等専門学校」設立に向けて「滋賀県立高専共創フォーラム」にも参画しており、大学発スタートアップ企業として、滋賀県の人材育成の取組にも協力してまいります。
本成果発表会においては、三日月 大造 滋賀県知事、橋川 渉 草津市長 より、滋賀県草津市発スタートアップ企業としての人機一体への期待などをコメントとして頂戴する予定です。

▲ 草津市長 視察の様子(2024/05/09)
▲ 滋賀県知事 視察の様子(2024/06/10)
▲ 秘密基地人機一体 外観(滋賀県草津市内)
(3) 地元金融機関との連携
人機一体は、2023 年末から2024 年にかけて日本政策金融公庫 大津支店から資本性劣後ローン1億円の融資を、さらに滋賀県等に強い基盤を持つ滋賀銀行、京都信用金庫、京都中央信用金庫など、民間6金融機関から協調融資として総額5千万円の融資を受けております。一般的には、初期に多額の資金を必要とし、収益化まで時間がかかるディープテック・スタートアップへの融資は実行のハードルが非常に高いと言われていますが、地域的な繋がりだけでなく、金岡博士が語る人機一体の技術・ビジョン・将来性に理解と共感、そして期待を示していただき、創業初期から融資をはじめとする様々な御支援をいただいております。投資ファンド経由での出資や、地域のネットワークを活かした取引先の御紹介も受けており、今後も人型重機の社会実装に向けた連携を深化してまいります。
株式会社人機一体 会社概要
代表者 :金岡博士(Dr. KANAOKA)
所在地 :滋賀県草津市青地町648番地1
創立 :2007 年 10 月 01 日
創業 :2015 年 10 月 01 日(現商号への変更日)
資本金 :1 億円
事業内容:先端ロボット工学技術に基づく新規事業開発支援のための知的財産活用サービス
URL :https://www.jinki.jp/

人機一体は、先端ロボット工学技術を駆使した人間機械相乗効果器、すなわち人機の具現化および産業化により「あまねく世界からフィジカルな苦役を無用とする」ことを目指す立命館大学発ロボティクススタートアップです。滋賀県内で唯一「J-Startup KANSAI」(※2)に選定されております。
※2「J-Startup KANSAI」とは
経済産業省のJ-Startupプログラムの地域展開として、関西から世界へはばたく有望なスタートアップを選定し、公的機関と民間企業が連携して地域ぐるみで集中支援を実施することで、選定企業の飛躍的な成長をサポートする事業です。
